水平位移几种观测方法的比较
今天,一个做基坑变形监测的朋友问我,我们一般测水平位移都用哪种方法,那我直接告诉他,建议他用小角法进行观测。那么为什么我推荐用小角法进行观测,这其中我查找了网上的一些资料和现实观测中的一些经验,总结了视准线法、测小角法、前方交会法、极坐标法这几种观测方法的优缺点,看一下为什么推荐用小角法。
测小角法:
原理:具体的原理可以参考小角法原理及在基坑水平位移监测中的测量步骤这篇文章。
精度分析:
由小角法的观测原理可知,距离D和水平角β是两个相互独立的观测值,所以由上式根据误差传播定律可得水平位移的观测误差:
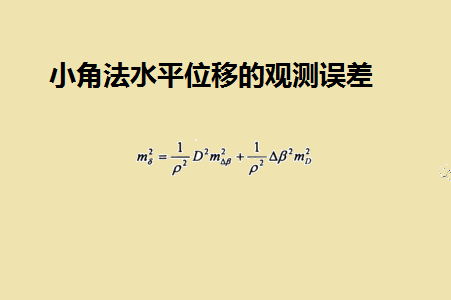
水平位移观测中误差的公式,表明:
① 距离观测误差对水平位移观测误差影响甚微,一般情况下此部分误差可以忽略不计,采用钢尺等一般方法量取即可满足要求;
② 影响水平位移观测精度的主要因素是水平角观测精度,应尽量使用高精度仪器或适当增加测回数来提高观测度;
③ 经纬仪的选用应根据建筑物的观测精度等级确定,在满足观测精度要求的前提下,可以使用精度较低的仪器,以降低观测成本。
优点:此方法简单易行,便于实地操作,精度较高。
不足:须场地较为开阔,基准点应该离开监测区域一定的距离之外,设在不受施工影响的地方。
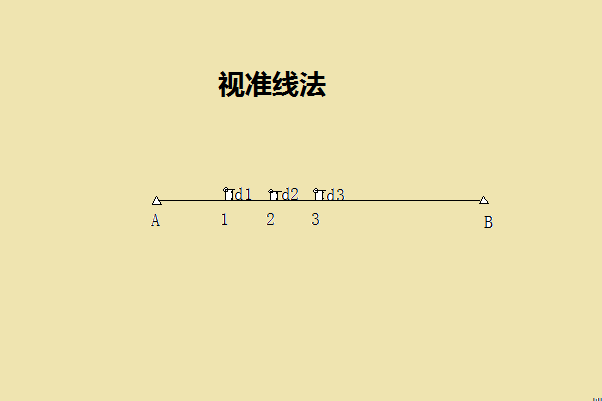
视准线法:
当需要测定变形体某一特定方向(譬如垂直于基坑维护体方向)的位移时,常使用视准线法或测小角法。
原理:如下图所示,点A、B是视准线的两个基准点(端点),1、2、3为水平位移观测点。观测时将经纬仪置于A点,将仪器照准B点,将水平制动装置制动。竖直转动经纬仪,分别转至1、2、3 三个点附近,用钢尺等工具测得水准观测点至A—B这条视准线的距离。根据前后两次的测量距离,得出这段时间内水平位移量。
精度分析:
由基准线的设置过程可知,观测误差主要包括仪器测站点仪器对中误差,视准线照准误差,读数照准误差,其中,影响最大的无疑是读数照准误差。
可知,当即准线太长时,目标模糊,读数照准精度太差;且后视点与测点距离相差太远,望远镜调焦误差较大,无疑对观测成果有较大影响。
另外此方法还受到大气折光等因素的影响。
优点:视准线观测方法因其原理简单、方法实用、实施简便、投资较少的特点, 在水平位移观测中得到了广泛应用,并且派生出了多种多样的观测方法,如分段视准线,终点设站视准线等。
不足:对较长的视准线而言, 由于视线长, 使照准误差增大, 甚至可能造成照准困难。当即准线太长时,目标模糊,照准精度太差且后视点与测点距离相差太远,望远镜调焦误差较大,无疑对观测成果有较大影响。精度低,不易实现自动观测,受外界条件影响较大,而且变形值(位移标点的位移量)不能超出该系统的最大偏距值,否则无法进行观测。
前方交会(测角前方交会):
如果变形观测点散布在变形体上或者在变形体附近无合适的基准点可供选择时,人们常用前方交会法来进行观测,这时,基准点选择在面对变形体的远处。
测角前方交会:
原理:
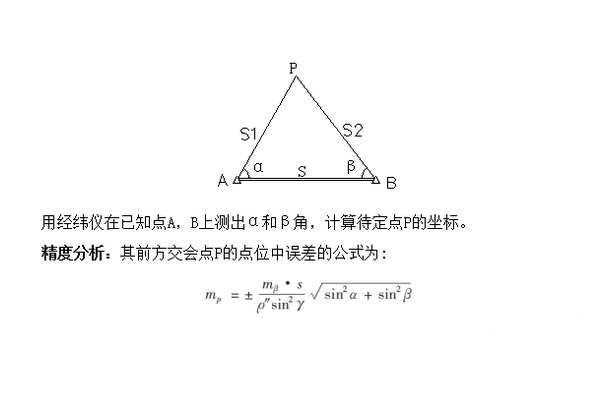
式中ms为测角中误差,ρ"=206265,S为A、B间距离。对该式的进一步分析表明:当γ=90°时,点位中误差不随α,β的变化而变化;当γ>90°时,对称交会时的点位中误差最小,精度最高;当γ<90°时,对称交会时点位中误差最大,对精度不利。
优点:前方交会法相对于其他水平位移观测的方法如视准线法、小角度法等具有以下优点:① 基点布置有较大灵活性。前方交会法的工作基点一般位于面向测点并可以适当远离变形体,而视准线法等方法的工作基点必须设置在位于变形体附近并且必须基本与测点在同一轴线上,所以前方交会法工作基点的选择更具灵活性。特别是当变形体附近难以找到合适的工作基点时,前方交会法更能显出其优点。②前方交会法能同时观测2个方向的位移。③观测耗时少。当测点较多,并分布在多条直线上时,前方交会法的耗时较视准线等方法少。
不足:前方交会法由于受测角误差、测边误差、交会角及图形结构、基线长度、外界条件的变化等因素影响,精度较低。另外,其观测工作量较大,计算过程较复杂,故不单独使用,而是常作为备用手段或配合其他方法使用。
特别的,对于边长交会法,由于测距仪的测距精度包含固定误差和比例误差,当距离增加时其误差也会增大。在选择工作基点时,除要满足通视和工作基点的稳定性外,还必须考虑工作基点与测点间的视距不要过长。
极坐标法
极坐标法属于边角交会法,是边角交会法的最常见的方法。
原理:
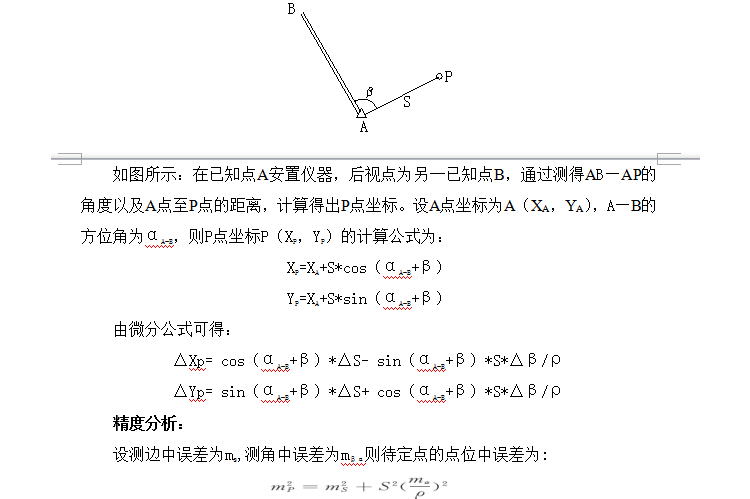
两个方向的水平位移中误差为:
M△Xp=√2*√(ms2*cos2(αA-B+β)+sin2(αA-B+β)*S2*mβ2/ρ2)
M△Yp=√2*√(ms2*sin2(αA-B+β)+cos2(αA-B+β)*S2*mβ2/ρ2)
其中,ms为测距中误差,mβ为测角中误差,αA-B为A-B便的方位角,ρ=206265。
优点:使用方便,尤其是利用全站仪进行测量可以直接测得坐标,简单快速。
不足:精度较低,适用于精度不是很高的水平位移监测工作。
对于上面的四种方法,都列出了优缺点,基坑变形监测中,我们最好根据实际情况去选择比较实用、经济、简单的方法。小角法相对于其他方法来说在一般的基坑中相对简单的观测方法,计算起来也是比较简单。所以建议使用小角法。
版权保护: 本文由 沉降之家 原创,转载请保留链接: http://www.chenjiangz.com/bianxing/148.html
- 上一篇:怎么确定基坑变形监测有哪些监测内容
- 下一篇:建筑物倾斜观测方法详细分析


