数字水准仪i角检验方法
在我们平时的沉降观测过程中,精度的控制是非常重要的,关系到我们最终数据报告的准确性,因此我们一定要控制沉降观测的误差。为了减少这些误差,其中之一,对于i角的检验显得非常重要,i角误差的大小直接关系到我们最终数据合格不合格。因此,我们要学会如何检验i角,下面我有针对性的介绍其中一种方法,做到学以致用。
电子水准仪i角检验方法包括4种:费式(Forstner)法,李式(Nahbauer)法,库式(Kukkamaki)法,日本(Japanese)法。其基本原理相同,即利用i角对水准标尺上读数的影响与距离成比例这一特点,从而比较在不同距离的情况下,水准标尺上读数的差别而求出i角。
其一般测定的方法是:距仪器一定距离处分别选定A点和B点,以便安放水准标尺A、B,两点的高差h是未知数,要测定的i角也是未知数,因此选定2个位置I1、I2安置仪器,测定2份A、B高差成果,建立2个相应的方程式,从而解出这2个未知数(h,i)。
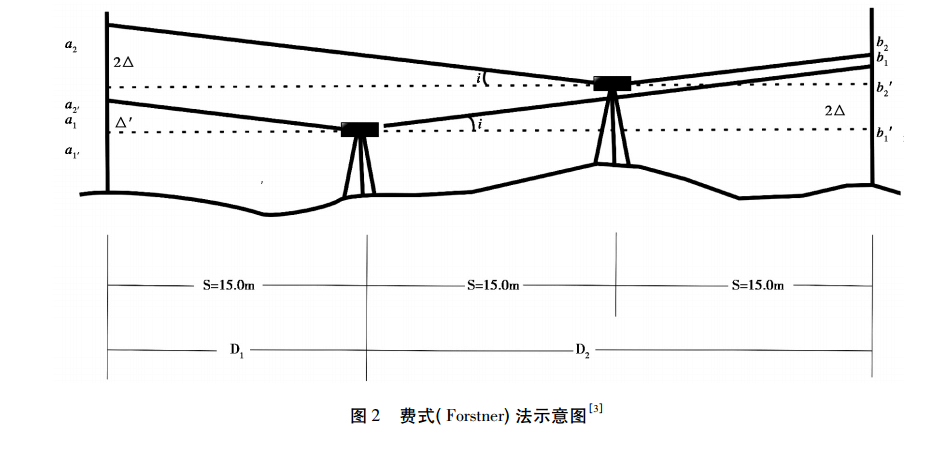
日常工作中主要是使用费式(Forstner)法,因此着重介绍它。如图2所示,选定2个相距大约为45.0m的固定点A、B。把这段距离平均分成3段,并在两点的连线之间分别距A、B大约15.0m处设2个测站I1、I2。在I1测站上,照准水准尺A和B,读数为a1和b1,当i=0时,水平视线在水准尺上的正确读数应为a1'和b1',所以由于i角引起的误差分别为Δ和2Δ。同样,在I2测站上,照准水准尺A和B,读数为a2和b2,正确读数应为a2'和b2',其误差分别为2Δ和Δ。
在测站I1和I2上得到A、B点的正确高差分别为:
h1'=a1'-b1'=(a1-Δ)-(b1-2Δ)=a1-b1+Δ (1)
h2'=a2'-b2'=(a2-2Δ)-(b2-Δ)=a2-b2+Δ (2)
如不顾及其他误差的影响,则h1'=h2',所以
由(1)、(2)式可得:
2Δ=(a2-b2)-(a1-b1)
式中,(a1-b1)和(a2-b2)是仪器存在i角时,分别在测站I1和I2上测得A、B两点间高差,以h1和h2表示,则上式可写为:
2Δ=h2-h1
Δ=1/2(h2-h1) (3)
由图2可知:
Δ=i″s/ρ″
即:i″=ρΔ/s (4)
至此,由公式(3)和(4)就求出水准仪的i值。
按照《国家一、二等水准测量规范》,最终得到:
i=Δ·ρ/(D2-D1)-1.61×10-5(D1+D2) (5)
式中,i为i角值,单位为角秒(″);ρ为206265,单位为角秒(″);a1为在I1处观测A尺的读数平均值,单位为毫米(mm);b1为在I1处观测B尺的读数平均值,单位为毫米(mm);a2为在I2处观测A尺的读数平均值,单位为毫米(mm);b2为在I2处观测B尺的读数平均值,单位为毫米(mm);D1为仪器距近标尺距离,单位为毫米(mm);D2为仪器距远标尺距离,单位为毫米(mm)。
版权保护: 本文由 沉降之家 原创,转载请保留链接: http://www.chenjiangz.com/jishu/83.html
- 上一篇:水准尺倾斜对测量精度的影响
- 下一篇: 电子水准仪测量原理
